Introduction
SSD是对YOLO的改进,其达到跟两阶段方法相当的精度,又保持较快的运行速度。
SSD
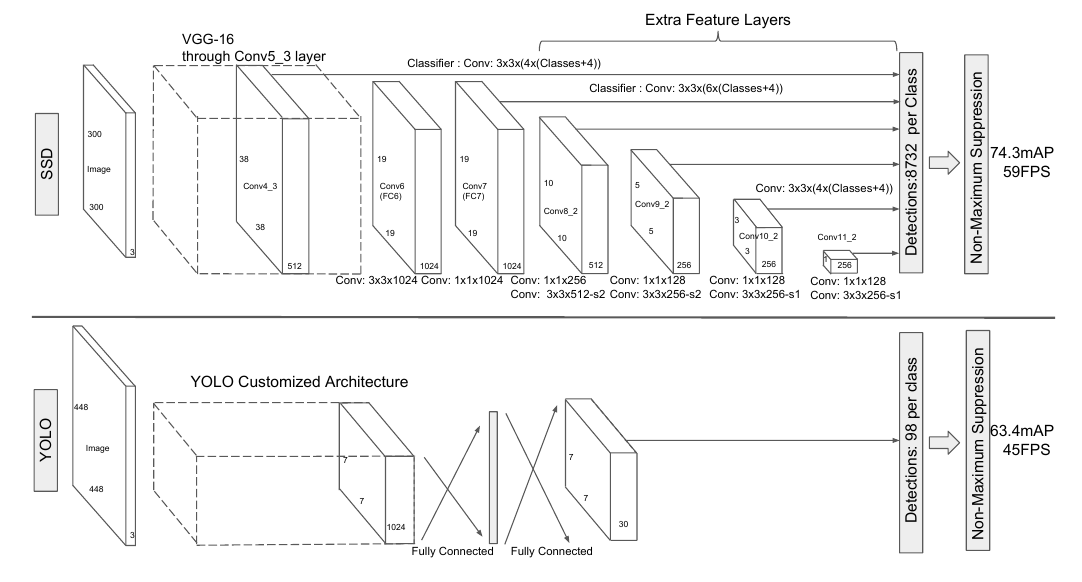
多尺度的feature map:基于VGG的不同卷积段,输出feature map到回归器中。这一点试图提升小物体的检测精度。
更多的anchor box,每个网格点生成不同大小和长宽比例的box,并将类别预测概率基于box预测(YOLO是在网格上),得到的输出值个数为(C+4)×k×m×n,其中C为类别数,k为box个数,m×n为feature map的大小。
Conclusion
SSD有点像多分类的RPN,生成anchor box,再对box预测分数和位置调整值。